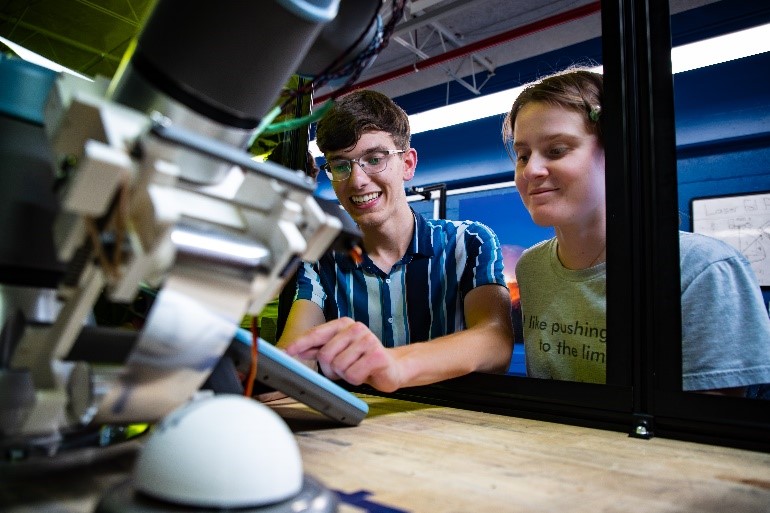
Automating the measuring of high explosives and binder into a container before securing it in a Resodyn acoustic mixer. Sponsor and Collaborator: Engineering Technology Maturation and Q-5
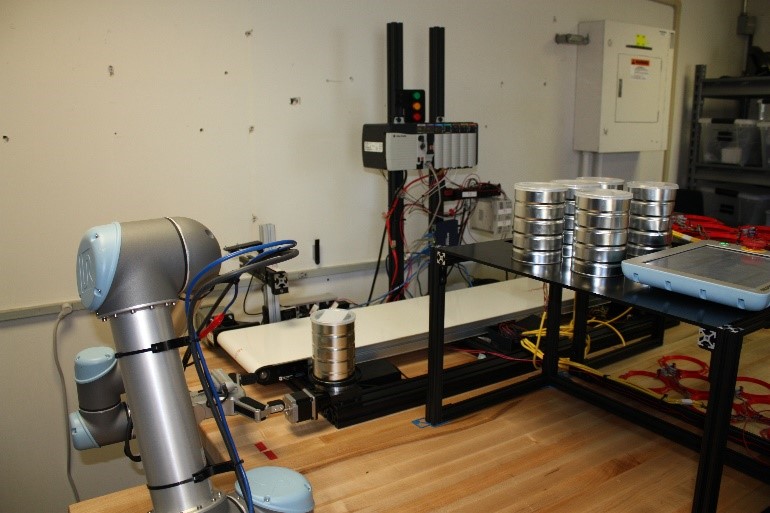
Excavate parts from a powder print bed and autonomously remove the excess powder from the parts. Sponsor and Collaborator: Engineering Technology Maturation and MST-7
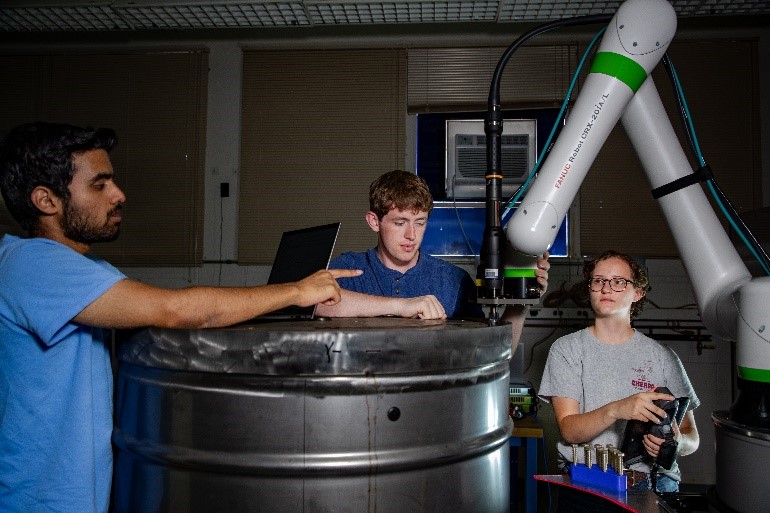
Acquire LiDAR data while addressing distortions caused by reflective surfaces which can degrade data accuracy. Sponsor and Collaborator: NA-191 – Science, Technology, and Program Offices - Nuclear Material Management and ALDWP
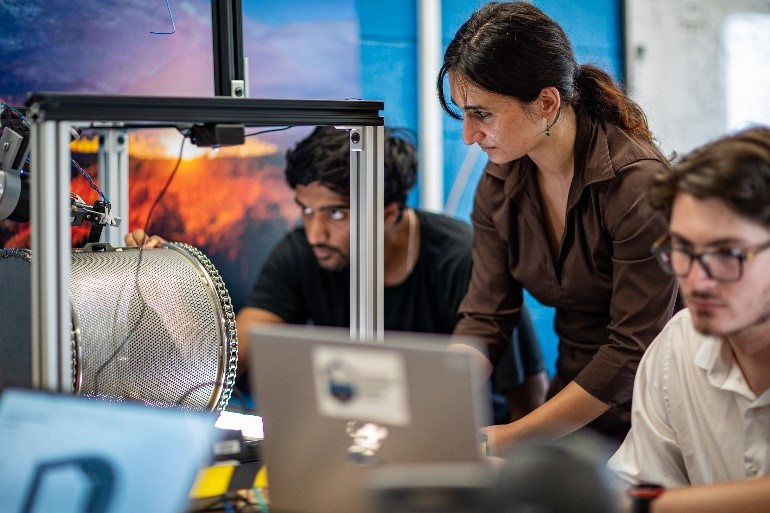
Autonomously position and tune an antenna array based on various sensor inputs. Sponsor and Collaborator: WRS and A-3